EKOFLUSH
Plateforme de recyclage d'eau de douche pour usage résidentiel et collectif.
EKOFLUSH récupère, filtre et stérilise l'eau de douche en circuit fermé. L'enjeu était de tenir une consommation très basse, une fiabilité 24/7 et une traçabilité complète de chaque cycle.
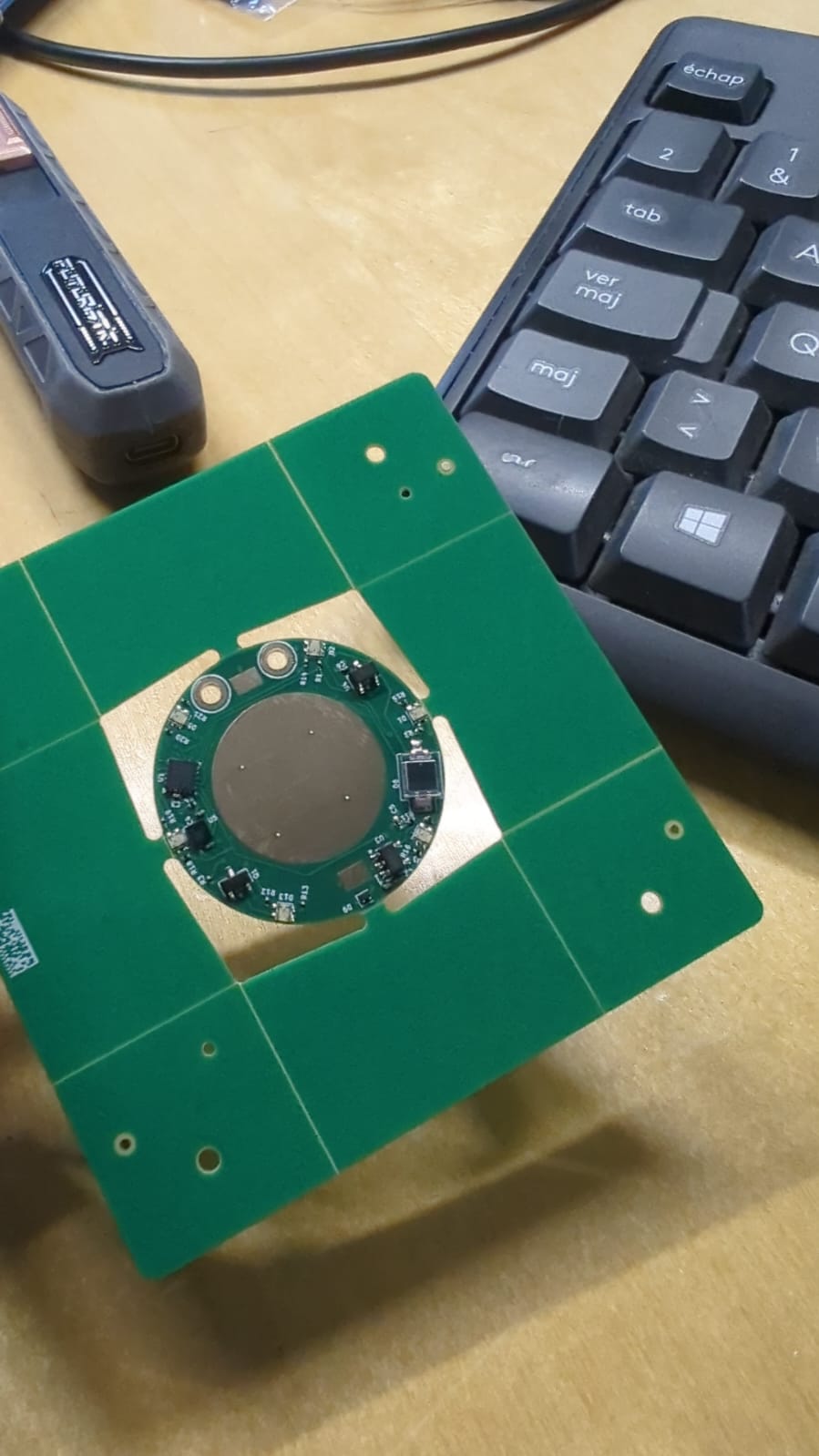
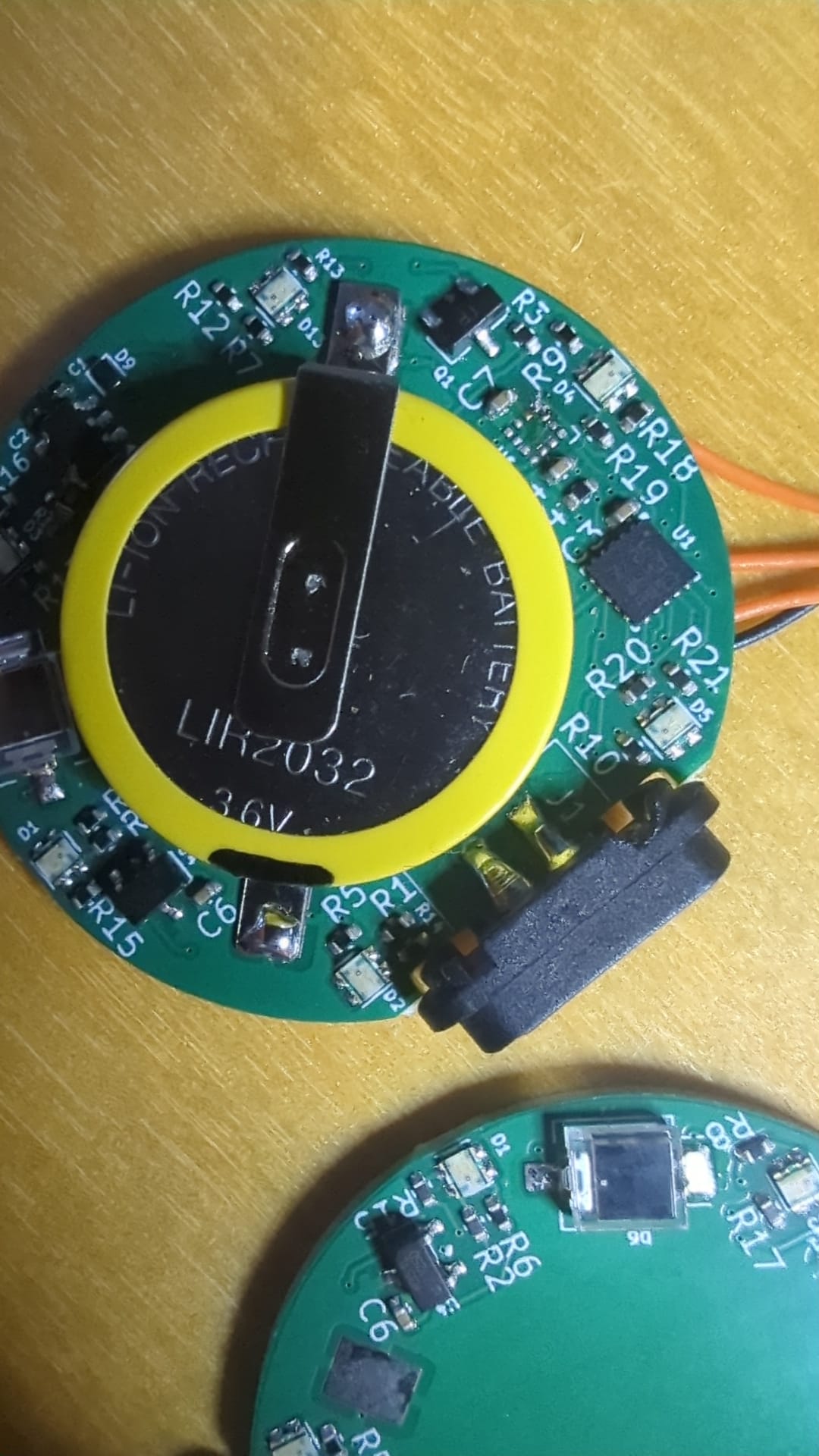
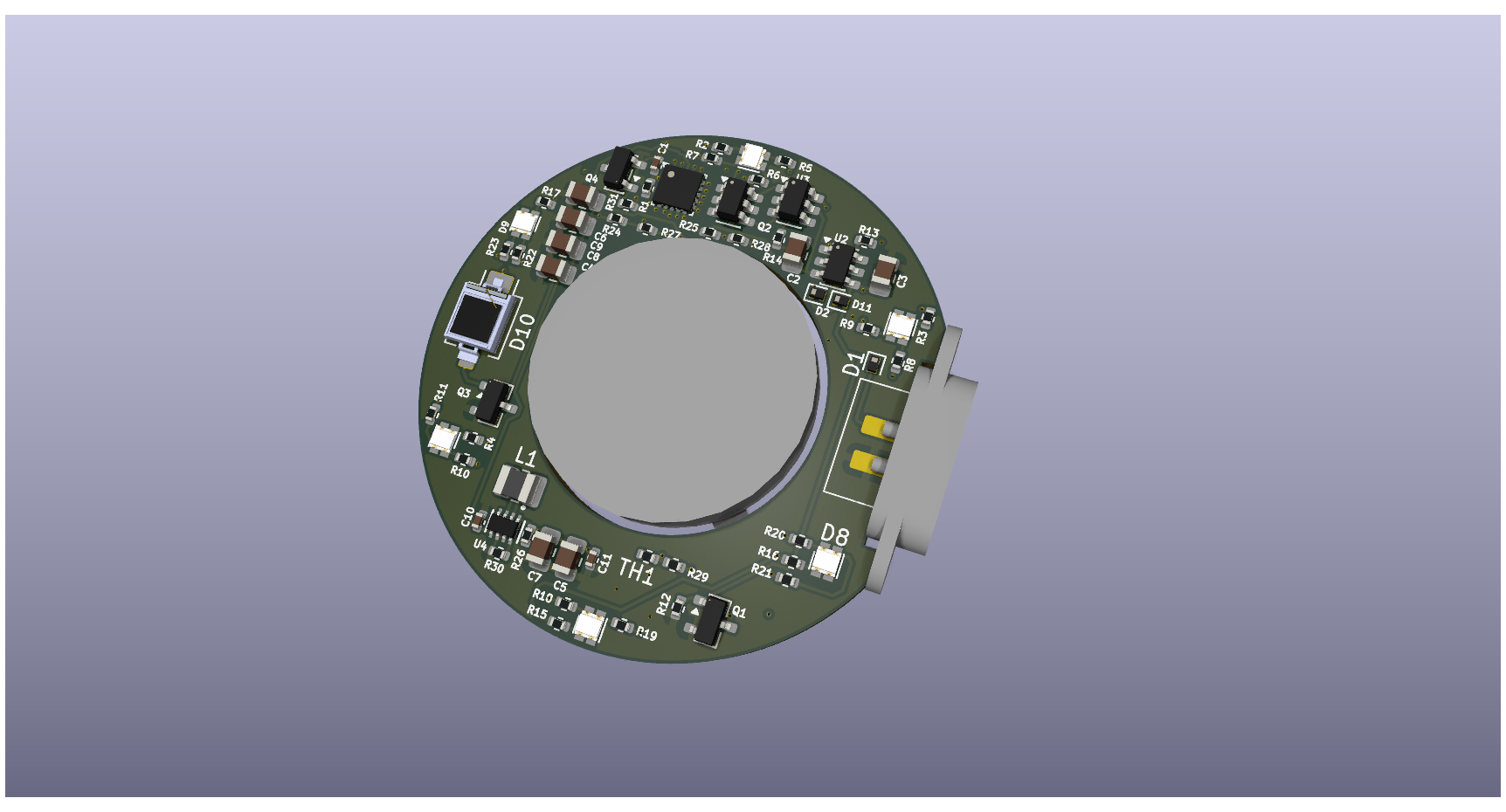
Nous avons conçu l'architecture matérielle (cartes de pilotage pompe, module UV, capteurs de pression et de turbidité) et le firmware temps-réel ESP32 / FreeRTOS. Le système intègre l'OTA, la persistance NVS et un protocole de remontée télémétrique adapté à des liens contraints.
Tout le code est versionné, testé en CI, et la production passe par une chaîne de flashage automatisée avec contrôle qualité unitaire.
- Stack
- ESP32-S3 · FreeRTOS
- Capteurs
- Pression, turbidité, débit
- Communication
- Wi-Fi · MQTT/TLS
- Mise à jour
- OTA différentiel signé
- Énergie
- 24 V continu, < 8 W veille
- Statut
- En production série